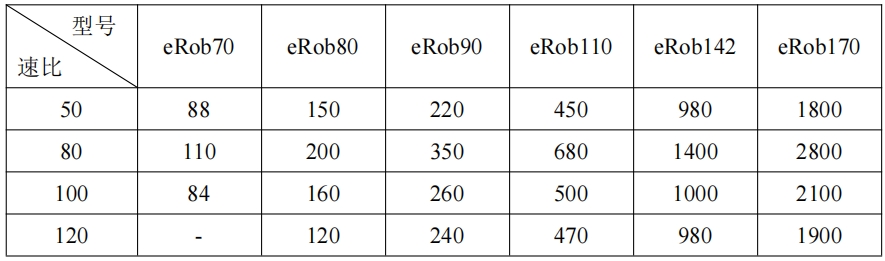
机器人关节模组运转中受到过度的冲击转矩作用时,在减速机柔轮等未发生破损的状态下刚轮和柔轮齿轮的啮合会瞬间发生偏移,这种现象被称为棘爪。此时的转矩被称为棘爪扭矩(棘爪扭矩的数值参照下表)。如果发生棘爪现象仍继续使其运转,会由于棘爪发生时产生的磨损粉尘导致齿轮发生早期磨耗,缩短波发生器轴承的使用寿命。
机器人关节发生棘爪的扭矩值(单位:Nm)
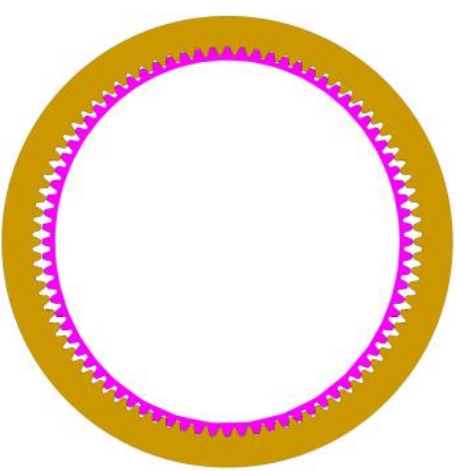
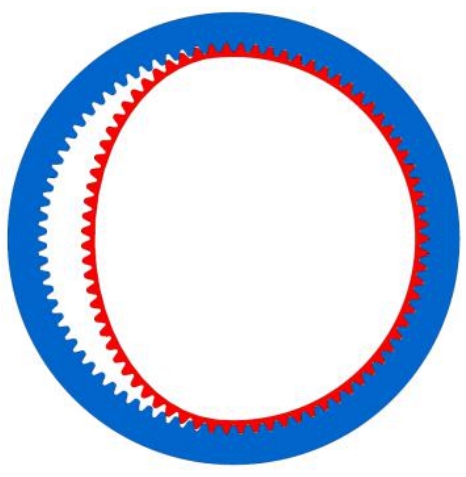
齿轮啮合正常形态如左下图所示。当发生棘爪时可能会出现齿轮啮合不正常,如右下图所示,呈单侧偏移的状态。此时继续运转会发生振动,引起柔轮破损。
售前咨询:
电话:134 8079 6208
邮箱:sales@zeroerr.com





















 粤公网安备 44030602007887号
粤公网安备 44030602007887号