省掉上百种机械电子器件选型、设计、采购、组装的人力和时间成本。




具备EtherCAT、CANopen,Modbus通信,开放的位置环、速度环、电流环数据及PID实时调节,适合动态变负载、变惯量的机器人应用。
还有:
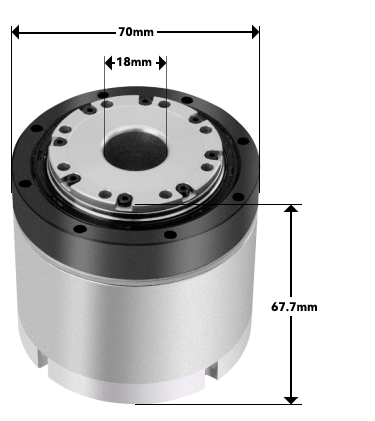
±10V模拟量接口、脉冲方向接口、I/O接口、RS485接口、外部编码器接口、STO接口,全部都在D×L=70×67mm的空间。
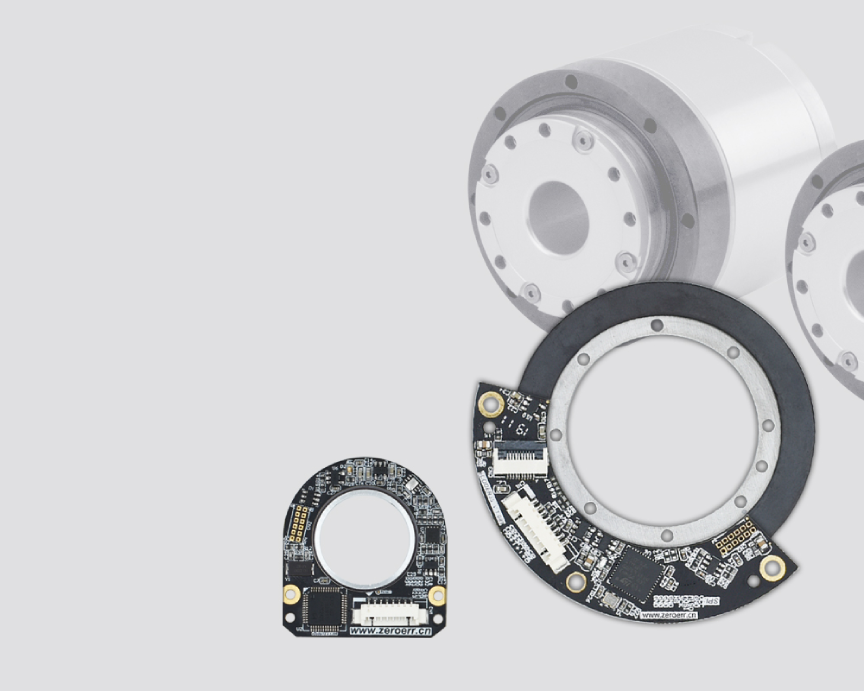
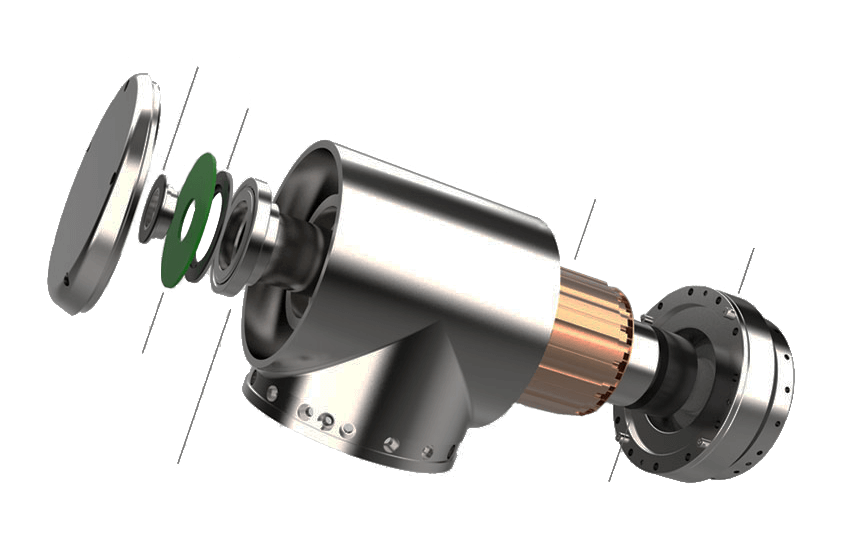
重复定位精度高达±7角秒,绝对定位精度高达±15角秒*,可记忆单圈及多圈断电位置,全闭环控制,无磨损精度。实时补偿减速机传动误差和齿隙。
| 关节系列 | eRob80HXXT | |||
|---|---|---|---|---|
| 谐波减速机-速比 | 17-50 | 17-80 | 17-100 | 17-120 |
| 启停峰值扭矩(Nm) | 44 | 56 | 70 | 70 |
| 平均负载转矩容许最大值(Nm) | 34 | 35 | 51 | 51 |
| 额定扭矩(Nm) | 21 | 29 | 31 | 31 |
| 瞬间容许最大扭矩(Nm) | 91 | 113 | 143 | 112 |
| 输出端峰值转速(RPM) | 60 | 37.5 | 30 | 25 |
| 电机功率(W) | 146 | |||
| 供电电压(V) | 48V(±10%) 请务必详细阅读《为什么不能用普通的开关电源作为模组的供电?》
以及《关节模组手册》第三章eRob输入电源说明
|
|||
| 输出端编码器分辨率 | 19Bit | |||
| 重复/绝对定位精度* | ±10/45角秒 | |||
| 通讯总线 | EtherCAT/CANopen | |||
| 外径×长度×通孔(mm) | 85×111.8×18 | |||
| 重量(KG) | 1.94 | |||
| 接口设计 | 全差分接口设计,抗干扰能力强;双组防松插头,可串联并网 | |||
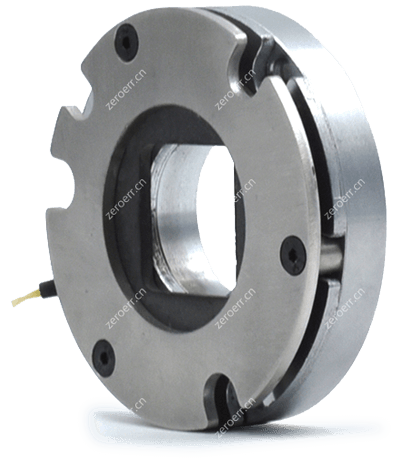
| 制动器 | 摩擦式阻尼制动器 | |||
| IP等级 | IP65 | |||
| eRob |
|
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 70 |
 |
|||||||||||||||
| F |
|
|||||||||||||||
| 100 |
|
|||||||||||||||
| I |
 I型关节  T型关节 |
|||||||||||||||
| B |
|
|||||||||||||||
| M |
|
|||||||||||||||
| 18 |
 |
|||||||||||||||
| E |

|
|||||||||||||||
| N |
|
|||||||||||||||
| □ |
|
|||||||||||||||
|

*关于精度具体说明,详见机器人关节精度检测报告

























 粤公网安备 44030602007887号
粤公网安备 44030602007887号