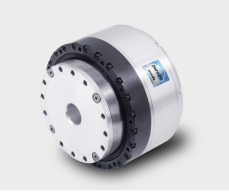
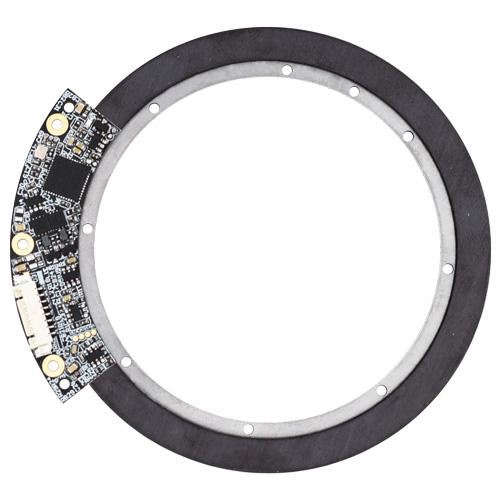
eRob110H100I-BHM-18ET
(100速比,高精度编码器,EtherCAT版本)V6版本一台

连接法兰一件

汽车方向盘一个

ePower电源一台
eRob专用线缆一根

网线一根
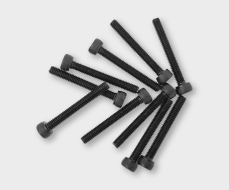
内角圆柱头螺钉
M4×30 4个
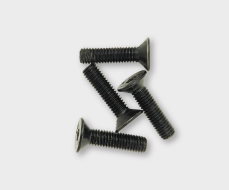
内角沉头螺钉
M5×20 10个
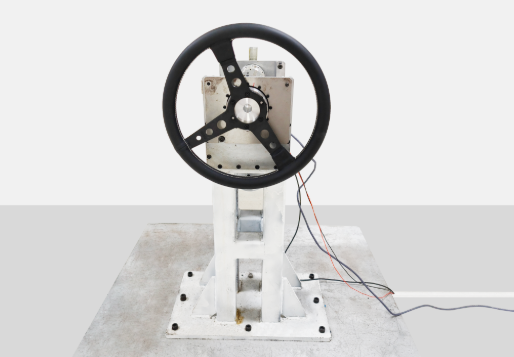
将关节固定,安装连接法兰,打上沉头螺丝,固定法兰与关节,使用4根方向盘配套螺丝将方向盘与法兰进行固定。
使用ePower电源产生48V电压对关节进行供电,通过网线接双绞线使关节与主站进行通信。
参考《eRob CANopen and EtherCAT用户手册v1.9.pdf》的第六章“TwinCAT主站控制”介绍的基于 Beckhoff TwinCAT3 主站对 ZeroErr EtherCAT 从站设备进行 PDO 配置以及运动控制的方法和步骤进行基本的配置。
| Name | Address | Align |
| Transmit PDO | 0x1A00 | 链接变量 |
| Dual encoder difference value | 0x2241 | GVL.DualPosDiff |
| Position actual value | 0x6064 | GVL.actPosition |
| Actual velocity | 0x606C | GVL.actVelo |
| Receive PDO | 0x1600 | 链接变量 |
| Profile acceleration | 0x6083 | GVL.udiProAcc |
| Profile deceleration | 0x6084 | GVL.udiProDec |
| Modes of operation | 0x6060 | GVL.siOperationMode |
| Target Velocity | 0x60FF | GVL.targetVelo |
① 将程序进行编译→Restart TwinCAT(Config Mode)→Activate Configuration;
② 在Receive PDO中手动将Control word从6使能(Force)为47,使能关节
③ 载入程序,将参数 iStep 从0修改为1,开始程序;
④ (可选)在示波器模块中观测关节运行状态;
⑤ 调整K,B,M等参数来进行柔顺控制的不同情况的模拟;
⑥ 将参数 iStep 从15修改为1000,停止程序;
⑦ 等待 iStep 自动变为0,关节速度为0,将Control word从47使能(Force)为6,下使能关节。




















 粤公网安备 44030602007887号
粤公网安备 44030602007887号