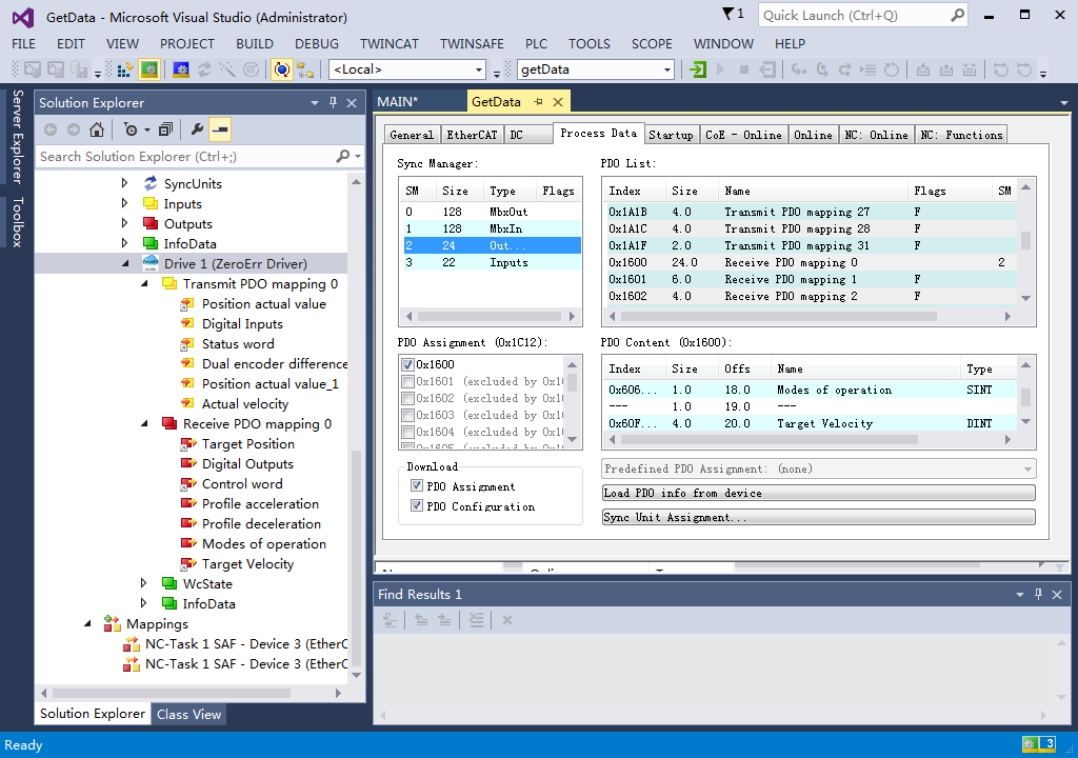
参考《eRob CANopen and EtherCAT用户手册v1.9.pdf》的第六章“TwinCAT主站控制”介绍的基于 Beckhoff TwinCAT3 主站对 ZeroErr EtherCAT 从站设备进行 PDO 配置以及运动控制的方法和步骤进行基本的配置。
| Name | Address | Align |
| Transmit PDO | 0x1A00 | 链接变量 |
| Dual encoder difference value | 0x2241 | GVL.DualPosDiff |
| Position actual value | 0x6064 | GVL.actPosition |
| Actual velocity | 0x606C | GVL.actVelo |
| Receive PDO | 0x1600 | 链接变量 |
| Profile acceleration | 0x6083 | GVL.udiProAcc |
| Profile deceleration | 0x6084 | GVL.udiProDec |
| Modes of operation | 0x6060 | GVL.siOperationMode |
| Target Velocity | 0x60FF | GVL.targetVelo |
1. 设置机器人关节操作模式为3,即轮廓速度模式(PV mode)
2. 设置加减速度
3. 根据当前角度设置运行速度
4. 通过状态机实现关节正反运行
在项目工程中添加一个Scope YT Project.tcscope的项目
在原始一个的Axis的基础上新建两个新的Axis,按照DualPosDiff,actVelo,actAngle的顺序依次填入三个Axis中
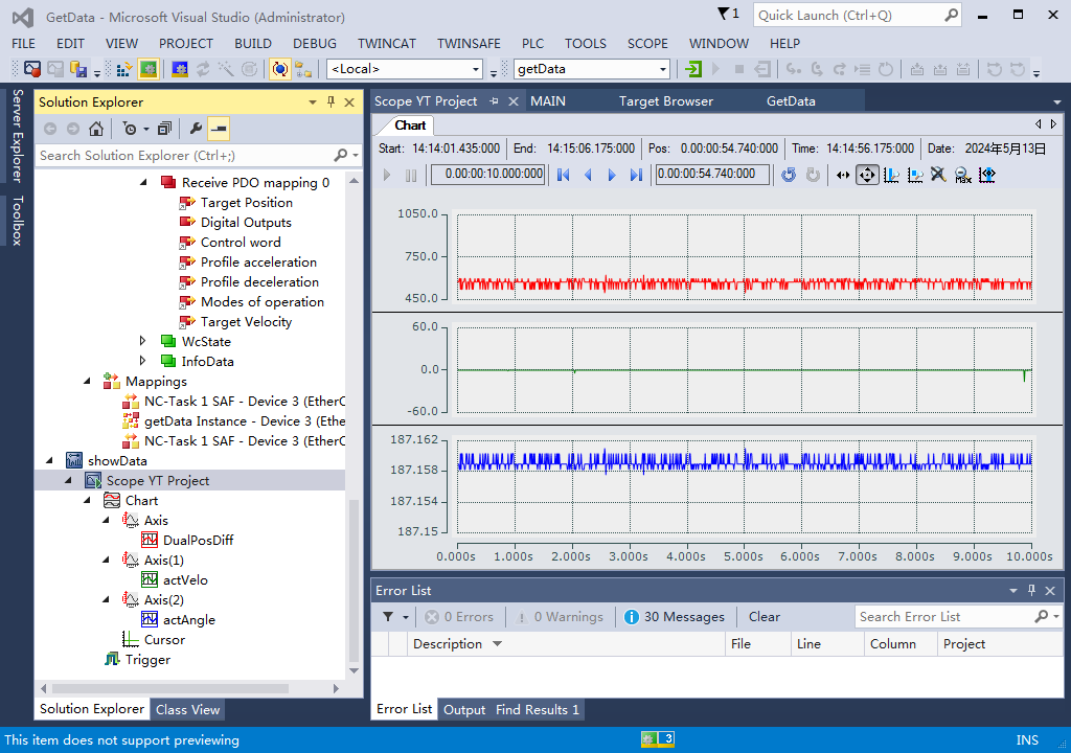
1. 将程序进行编译→Restart TwinCAT(Config Mode)→Activate Configuration;
2. 在Receive PDO中手动将Control word从6使能(Force)为47,使能关节;
3. Scope Record start(开启示波器);
4. 等待观察到关节完成一个完整的正反转周期性运动后可以停止程序;
5. Stop record,将示波器数据导出为csv文件(记录路径);
6. 将Control word将47使能为6,将关节下使能;
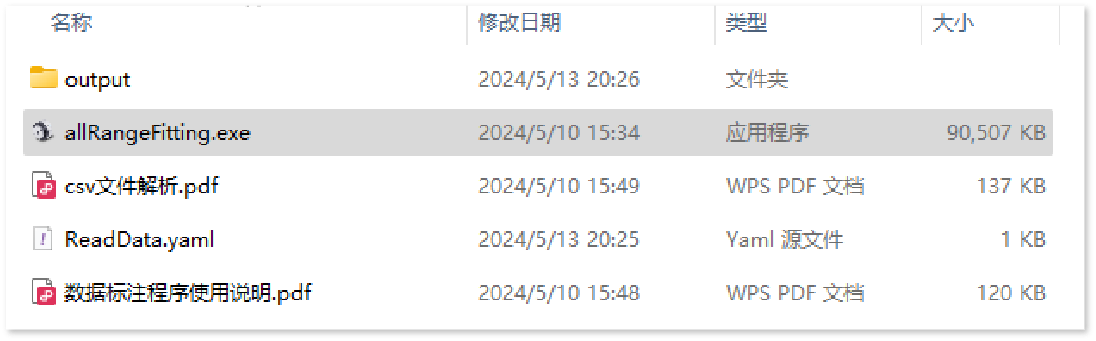
1. 修改文件夹中的 ReadData.yaml 中的 path 路径为上面导出的csv文件的路径;
2. 双击运行 allRangeFitting.exe ,等待十秒程序运行完成;
3. 随后即可在output获得输出的拟合图片和配置参数;
4. 记录参数,稍后添加到主运行程序中;





















 粤公网安备 44030602007887号
粤公网安备 44030602007887号